

{kind=link}
{kind=link}
{kind=link}
面向复杂产品设计的本体推理研究
[李红梅 , 丁晟春]
, 丁晟春]
, 丁晟春]
|
|


作者贡献声明:
李红梅: 提出研究思路, 设计研究方案, 完成实验, 撰写论文; 丁晟春: 提出研究课题, 修改论文框架并修订论文。
【目的】充分重用与共享复杂产品设计中的隐含知识。【方法】研究本体推理在产品设计中的应用, 对产品设计中的规则需求和类型进行分析, 形成逻辑关系和设计参数约束规则, 设计产品设计规则到推理规则的转换流程, 提出面向复杂产品设计的本体推理框架。【结果】基于该框架进行机械手设计中的本体推理实验, 在设计本体构建的基础上实现机械手驱动装置和参数值的推理与知识扩充。【局限】针对设计参数中的定性约束未能有效地实现推理。【结论】实验结果验证本体推理框架的可行性。
[Objective] To reuse and share implicit knowledge in complex product design.[Methods] Apply Ontology reasoning to the product design. After analyzing product design rules requirement and type, divide the rules into logical relationship and parameter constraint rule. Then transfer the rules to inference rules, achieve inference through product design-oriented Ontology reasoning framework.[Results] In the manipulator design reasoning experiment, manipulator design Ontology is built. It achieves the dynamic drive and parameter values to expand knowledge.[Limitations] The reason for qualitative parameters in the design constraints is not realized.[Conclusions] The experimental results verify the feasibility of the Ontology reasoning framework.
复杂产品是指客户需求复杂、产品组成复杂、技术构成复杂、研发成本高、一般单件小批生产、多个单位协同研发和生产的一类产品, 如航天器、飞机、汽车、船舶、武器系统等用于国防建设的大型军工产品[ 1, 2]。复杂产品设计涉及不同领域、不同层次、不同类型的知识。复杂产品设计大多依赖于个人的经验和对知识的理解, 通常只是一部分需要重新设计, 其余部分或采用现有产品的设计或在现有产品的基础上修改重新研制。复杂产品设计在国家武器装备行业中有着重要应用, 因此将设计知识、专家、机器有机结合, 发现和选择合适的推理方法能有效地将用户需求映射到产品功能结构上, 合理重用和融合已有的经验、知识和理论, 帮助设计人员快速准确地进行产品设计。
随着人工智能的发展, 规则推理、案例推理、定性推理、本体推理等相关推理模式逐渐应用到产品设计中。规则推理是最早的推理方式; 案例推理适用于设计经验丰富型的领域; 人工神经网络推理则通过模拟人类输入信号激活或抑制神经元进行概率数值计算; 定性推理是在信息不完全情况下使用略去无关细节的定性信息给出定性解释; 本体推理是利用本体中的概念和属性进行逻辑推理。目前使用多种技术结合的混合推理是解决单一推理方法效率低下、不能快速获得最优方案的一种很好途径, 常用的混合推理模式有: 结合案例推理与规则推理[ 3, 4], 结合模糊网络与本体推理[ 5, 6], 结合案例推理与本体推理[ 7, 8]。其中, 本体能充分表达产品复杂的语义关系, 本体推理技术在混合推理中起到重要作用, 能够在多种设计规则的约束条件下挖掘产品设计知识中隐含的信息。
在产品设计中本体推理的应用是针对用户提出的需求, 对设计知识采用本体进行表示。根据设计规则和经验, 使用Jess、Jena、Pellet推理引擎结合Jena规则、SWRL规则实现知识推理, 有效开发蕴藏在企业内部不同设计人员的显性和隐性知识, 最终实现知识重用。在国外, Cebrian-Tarrason等[ 9]将本体推理应用到方案设计中, 进行自动铅笔设计; Zhu等[ 10]在产品组装中使用SWRL/SQWRL规则推理; Abdul-Ghafour等[ 11]利用本体及其推理有效地共享智能CAD设计中涉及到的知识。在国内, Chen[ 12]进行经验知识的本体表示和推理研究, 以实现经验知识的共享; 丁晟春等[ 13]使用Jess推理机进行隐含关系的挖掘与显示化; 谢新文等[ 14]基于OWL利用Pellet、Jess推理引擎结合SWRL语言开发模具企业知识集成系统; 王毅等[ 15]设计了基于本体的多层知识表达与推理模型进行注塑模改模知识的重用。对已有研究进行分析, 发现应用在产品设计中的本体推理仍有以下不足:
(1) 对本体推理技术的研究只能应用于简单的设计实例, 而且偏向于事先给定某些现实中不存在的简单假设。
(2) 未针对不同的知识类型归纳相应的推理需求和规则类型, 如产品实体关系、概念分类、参数约束等类型对应的推理需求会存在差异。
(3) 复杂分散的产品设计规则到推理规则的转换没有一定的规范流程, 随着应用范围的扩大会导致不能有效地发掘隐含知识, 难以满足复杂产品设计的需求。
针对以上不足, 本文将推理技术转化到复杂产品设计的实际应用上, 通过对本体推理进行研究, 分析产品设计的规则需求和类型, 设计产品设计规则到本体推理规则的转换流程, 最后提出一个面向产品设计的本体推理应用框架, 并在机械手设计应用中验证其可行性。
在复杂产品设计中, 专家在实践中积累了大量可以形式化的经验和设计规则, 包括工艺选用原则、材料选取、功用确定、设计标准选择、结构参数的设计与约束等, 不同的设计规则类型在本体推理时的处理是不同的, 本文将其分为逻辑关系和约束两大类:
(1) 逻辑关系
逻辑关系是指概念与概念、概念与实例、实例与实例之间的等级和非等级关系, 即产品部件、功能、结构等概念与概念的关联, 在本体中体现为对象属性和公理。产品概念间的语义逻辑关系包括以下几种: 同义关系(synonym-equal)、上下位关系(hypernym, hy-pon-ym)、同位关系(associative-relation)、整体部分关系(part-of)、因果关系(cause-effect)、位置关系(location)、时序关系(sequence)、不相交关系(disjoint with)、自定义关系。
(2) 约 束
约束是针对产品部件的设计参数和公式参数的定性和定量约束, 比如某液压气压式复进机设计中, 节制环应有一定宽度, 一般取5-10 mm(定量约束), 以保证活塞小孔面积(
| 表1 设计参数约束类型 |
复杂产品设计知识多源异构, 涉及的设计规则也错综复杂。产品设计领域规则的集合构成设计规则库, 基于本体推理的需求, 需要将理解性的经验、标准等转换成机器可识别的规则格式, 如图1所示:
 | 图1 产品设计规则到本体推理规则的转换流程设计规则到推理规则的转换步骤如下:(1) 借鉴专家的经验和产品功能等知识, 以及产品设计过程中包含的设计目标、原理、公式等, 进行设计规则的转化与描述, 分成逻辑关系、定性约束、定量约束三类形式。 |
(2) 根据程序的产生式启发转换成一套IF-THEN规则, 分析前提与结论的变量、概念、关系之间的析取与合取, 表示前提和结论的内容。
(3) 结合不同的规则语法格式, 编写推理机能够识别的程序规则, 如Jena推理机自带的Jena自定义规则格式, 支持本体语义推理的SWRL规则格式, 并存储到规则库。
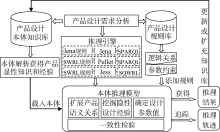
 | 图2 复杂产品设计中的本体推理应用框架 |
图2为本文提出的面向复杂产品设计的本体推理应用框架。在通用推理引擎的基础上, 紧密融合复杂产品设计需求。相比其他学者的研究, 不仅实现了复杂语义关系的扩展[ 13]和经验知识的挖掘[ 10], 同时将产品特有的设计参数约束进行归纳, 从而由已知参数中求得蕴涵的未知设计参数值, 更好地结合了复杂产品设计流程。该框架的关键在于产品设计本体知识库、设计规则库的构建以及推理机的选择和实施。产品设计知识库包括产品设计基础知识和设计流程知识, 利用本体的概念化方法全面系统地表达产品知识特征和实例。设计规则库分成两层: 逻辑关系推理规则和参数约束推理规则。逻辑关系规则包括产品概念、实例以及其对象属性、概念公理的逻辑判定; 参数约束规则包括产品设计参数约束和公式约束, 以及参数属性的范围组合对设计方案选择的决策规则。知识库和推理机相互独立, 设计问题的求解推理过程主要依赖于过去的经验和规则。如何将产品的知识库和规则库充分发挥作用, 这就需要实施推理, 挖掘本体知识库中的隐含知识, 扩充产品设计本体库, 在设计中进行重用和共享。本体推理的步骤如下:
(1) 确定产品设计对象, 进行设计需求分析, 明确产品设计知识内容特征以及设计问题, 以期更好地表达设计知识。
(2) 在Protégé中构建产品设计本体, 设计概念、语义关系、属性, 对本体的实例进行分类, 梳理更好的概念层次关系, 形成完整的OWL知识库, 保证推理的完整性。
(3) 结合OWL知识库中的本体、实例和属性, 对产品设计过程中的设计问题进行语义解析与转换, 构建该领域的设计规则库, 包括逻辑关系和定量约束两类, 格式有Jena规则与SWRL规则。
(4) 构建本体模型, 载入产品设计本体, 根据需求选择Jena、Pellet、Jess推理机, 并添加相应的Jena或SWRL规则实现产品语义关系扩展、隐性设计经验挖掘以及设计参数值确定等推理与应用。
(5) 验证推理结果的逻辑一致性与约束满足, 追踪本体中事实推理轨迹, 对新知识加以解释, 将专家经验知识显示化表达。
(6) 将推理出的隐性知识导出模型, 更新或扩充原来的产品设计本体OWL知识库。
机械手设计本体是复杂产品设计本体中的一个子部分, 机械手是能模仿人手和手臂的某些动作功能, 按固定程序抓取、搬运物件或操作工具的自动操作装置。其主要由手部、运动机构和控制系统组成。本文对机械手设计进行本体推理的实验。
为了对复杂产品设计知识进行充分有效的表达, 必须明确设计者的需求和需要表达的设计知识, 本文借鉴丁晟春等[ 16]的本体构建方法, 对机械手设计进行本体建模与构建。
(1) 确定本体的领域和范围
以大型武器装备设计为背景, 本体中的词汇来源于领域内经典教科书、文献中的专业术语、机械设计手册、《英汉兵器大词典》及专家经验知识等, 并由专家进行设计知识的正确性、全面性判断。
(2) 考察复用现有本体
引入SUMO顶层本体[ 17]中的关系, 如SUMO中的hasPartOf(P1 hasPartof P2, P1包含部分P2)、greater-Than(P1 greaterThan P2, P1大于 P2)、equal(P1 equal P2, P1等同 P2)等, 规范与完善机械手设计本体中的语义关系。
(3) 本体概念体系的构建
①确定核心大类。机械手设计的概念主要分成基础结构知识概念和设计流程知识概念。结构知识中含有大量定义、作用、原理、优缺点、用途等描述类知识, 设计流程知识即机械手设计中设计任务、设计注意事项、技术指标、设计流程、设计参数等。机械手设计本体中主要核心类是机械手类、机械手设计参数类和机械手设计流程类, 其他还包括运动形式、材料、执行器、物理单位等类。
②确定类的等级关系。基于等级关系(P1
③确定类间非等级的语义关系。分析机械手设计过程, 按照部件组成及结构关联确定整体部分关系、同义关系、转指关系、时序关系等。创建的概念间语义关系如下:
整体-部分关系(hasPart-isPartOf)指概念间的构成关系, 主要用于描述机械手部件间的构成关系, 该部分直接复用顶层本体SUMO[ 17]中整体-部分关系, 如设置“机械手”类的部分类为基座、机械臂和手爪推弹器。
同义关系(equal)指概念表示相同的含义, 如设置“电动马达”等同于“普通电机”。
不相交关系(disjointWith)指概念间没有交集, 如“直线运动”与“回转运动”。
时序关系(earlierThan-laterThan)指概念间存在时间上的前后关系。在机械手设计本体中, 设计流程大类的子流程间以earlierThan、laterThan连接表示流程的前后关系。
转指关系(P1
④确定数据属性。机械手需要将其结构、功能、用途、设计任务等知识表示出来, 具体数据属性有: hasDefinition、hasPrinciple、hasPurpose、hasDesignTask、hasAdvantage、hasDisadvantage、hasWeight等。设计参数对应的约束数据属性有: hasValue、hasValueOption、lessThan、lessThan-OrEqualTo、greaterThan、greaterThanOrEqualTo这6种表示参数值的限制。设计流程具有数据属性hasDesignMethod表示设计方法、hasDesignTip表示设计注意事项、hasDesi-gnIndicators表示设计指标等。
⑤创建实例。添加产品某型号部件的实例、已有的设计流程以及具体的设计参数实例。如某155 mm自行榴弹炮机械手的设计实例, 其设计任务为“设计一个每秒10发炮弹、适用于某155 mm自行榴弹炮的输弹机械手, 以实现供输弹过程的自动化”。针对155 mm自行榴弹炮机械手, 添加设计流程实例, 添加155 mm定位精度0.1 mm、155 mm, 运动速度不低于200 mm/s、旋转角度θ1为57°、旋转角度θ2为118.8°、机械手大臂L1为900 mm等10个设计参数, 运动形式为旋转, 具有总质量为80kg等数据属性值。
(4) 本体的OWL表示
借助本体工具Protégé, 以W3C组织推荐的OWL本体表示语言进行本体的表示和实现。最终构建的机械手设计本体包括39个类、38个属性、28个实例。
(1) 机械手设计问题与规则库构建
输弹机械手设计过程中, 需要选择驱动各个关节的动力装置来满足运动形式和定位精度约束, 而且机械手的参数大小之间也相互约束, 所以需要经过推理确定驱动装置和一些参数值。根据设计知识需求有以下设计问题:
①如何让机械手中的控制系统与运动机构相互配合。依据运动方式和定位精度, 推理得到驱动机械手运动的动力装置, 以便机械手能完成特定的动作。
②机械手的三个旋转角度设计参数之间存在公式约束为θ3= α- θ2- θ1(α为火炮高低射角)。给定α值, 如何根据获取的θ2与θ1自动挖掘和确定旋转角度θ3值。其中机械手运动方式与控制系统对电机的选择属于因果关系规则, 做直线运动时使用直线电机, 做旋转运动则需要回转电机。机械手运动的终止需要定位, 定位精度大小的约束与控制系统对驱动装置的选择属于定量参数约束规则。一般定位精度小于等于1 mm时则需要选择伺服电机和伺服油缸驱动, 大于1 mm时选择普通电机和普通油缸。旋转角度θ3值可由等式约束根据计算公式得出。
本实验涉及的设计规则描述如表2所示:
| 表2 机械手推理实验的设计规则描述 |
将设计需求中的规则分别转换为Jena和SWRL语言格式, 构建规则库, 共包括9条Jena规则, 9条SWRL规则, 部分规则如下:
①Jena规则: [rulemotor1:(?A rdf:type default:机械手) (?A default:hasMovement ?B) (?B rdf:type default:回转运动) →(?A default:useComponent default:回转电机)]; [rulemo-tor3: (?A rdf:type default:机械手)(?A default:hasParameter ?B) (?B rdf:type default:定位精度)(?B default:hasValue ?x) lessThan(?x,1)→(?A default: useComponent default:伺服电机)(?A default:useComponent default:伺服油缸)]
②SWRL规则: 机械手(?x)∧hasParameter(?x,?y)∧定位精度(?y)∧hasValue(?y,?z)∧swrlb: lessThanOrEqual(?z,1)→useComponent(?x,伺服电机)∧useComponent(?x,伺服油缸); 机械手(?x) ∧ 火炮高低射角(?a) ∧ hasValue(?a, ?a1) ∧ hasParameter(?x, ?y1) ∧ 旋转角度θ_1(?y1) ∧hasValue (?y1, ?z1) ∧ hasParameter(?x, ?y2) ∧ 旋转角度θ_2(?y2) ∧hasValue(?y2, ?z2) ∧ hasParameter(?x, ?y3) ∧ 旋转角度θ_3(?y3) ∧swrlb:add(?r, ?z1, ?z2) ∧ swrlb:subtract (?z3, ?a1, ?r) → hasValue(?y3, ?z3)
(2) 推理实验结果
基于第2节提出的本体推理框架, 采用Java语言实现机械手设计中的本体推理, 同时检验推理后的本体一致性, 查询推理结果, 追踪推理轨迹以及更新本体知识库。在此以3.1节的某155 mm自行榴弹炮机械手实例进行实验, 同时使用三种推理机并分析实验结果。
经过推理后, Jena、Pellet和Jess推理机分别推理出新的知识7条、8条、8条, 将推理得到的知识进行存储。虽然Jena规则含有数学内置函数, 但Jena推理与SWRL相比存在不足。公式参数约束的推理未成功导致Jena得出的新知识较少。针对逆反、传递关系等公理, Pellet可以不添加规则实现推理。此外, 本体推理工具由于实现的推理算法、优化技巧不同, 在准确性方面差别很大。Jena是基于规则的推理机, 比较依赖于规则的正误。Pellet基于Tableau算法,在描述逻辑推理上效果较好, Jess是基于Rete算法通用的推理机, 需要将SWRL规则和本体事实信息(Assertion形式给出)转换为Jess的知识格式才能进行推理, 结果不能保证本体一致性。但基于SWRL的规则只能应用于本体中已经命名的个体, 不能应用于未命名和不存在的个体, Jess添加自身的语法格式可以补充本体专用推理机的不足。Jena和Pellet是本体专用推理机, 支持本体一致性检验和推理追踪, 通过叠加 Pellet可以明显提高 Jena 推理的完备性, 能较完善地实现逻辑关系和约束规则的推理。但目前三种推理机还没有实现对定性参数约束的推理, 仍需要进一步研究定性约束规则的表示与本体推理的实现。
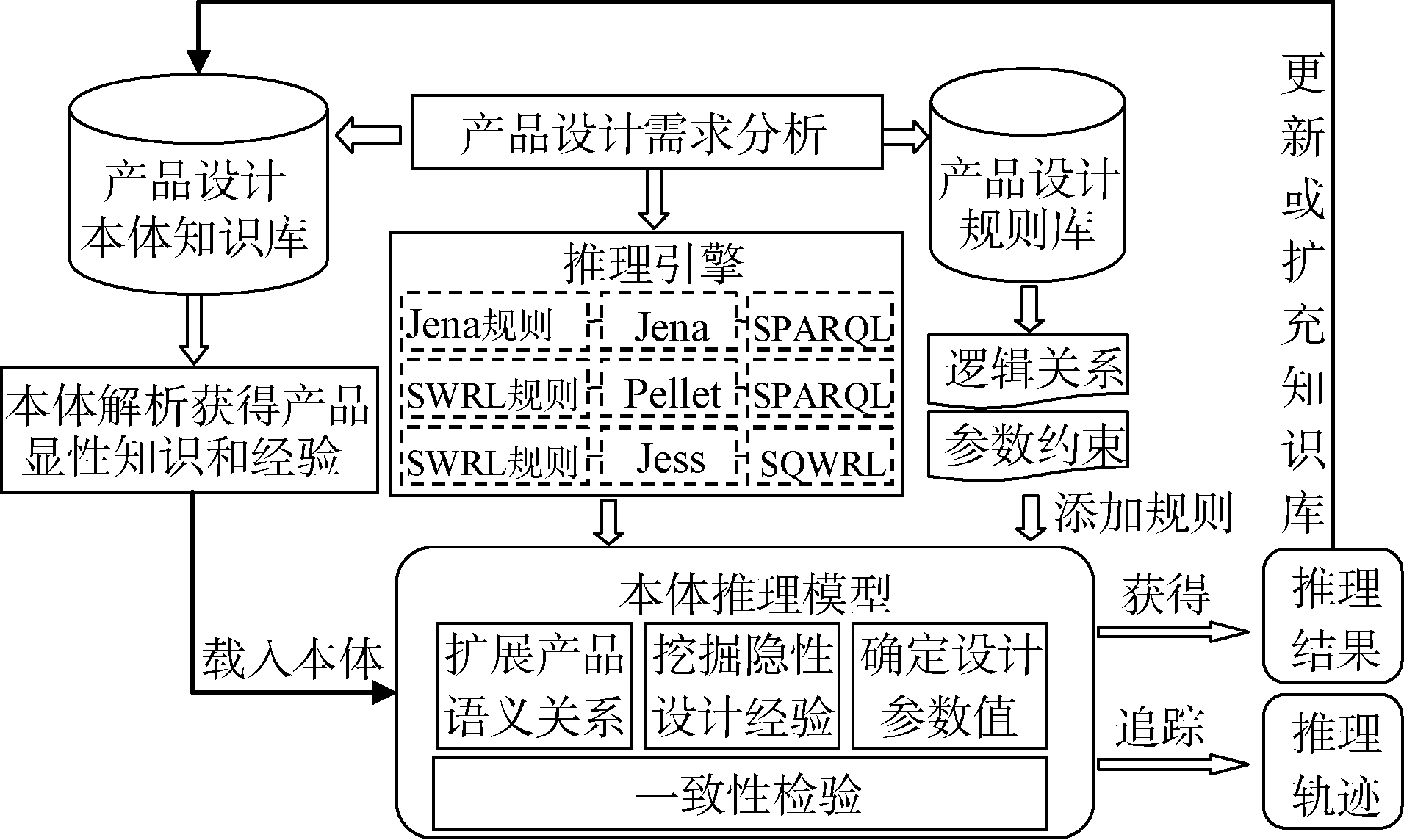
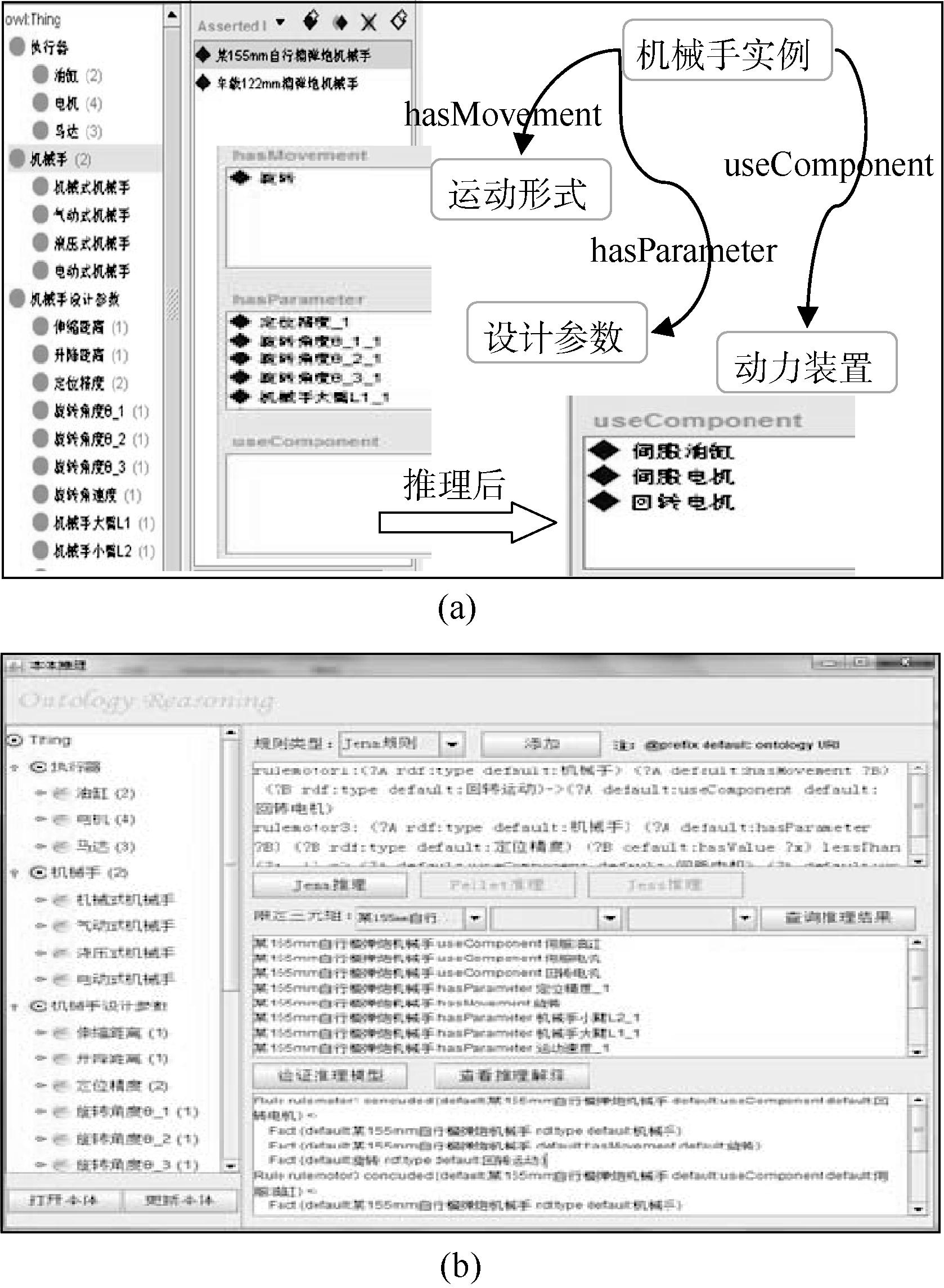 | 图3 机械手本体推理实验的结果 |
本体中实例及驱动装置的推理过程和知识状态如图3(a)所示,图3(b)是使用Jena规则表示运动因果关系与定位精度约束规则确定机械手驱动装置的推理实现。某155 mm自行榴弹炮机械手在做旋转运动且定位精度要求为0.1 mm, 那么依据经验知识最终获得驱动机械手关节的动力装置为伺服、回转电机和伺服油缸, 并将结果存入本体知识库以便在设计中使用。
针对复杂产品设计中的知识重用需求以及推理技术难以支持现实世界产品设计的问题, 本文分析逻辑关系和约束两大类规则需求构建规则库。在机械手设计中进行本体推理实验, 验证了本文面向复杂产品设计中的本体推理应用框架的可行性。最终通过Jena、Pellet、Jess推理机挖掘产品设计中的语义关系、参数值、隐含经验等8条新知识。研究发现Jena能够很好地解析本体, Pellet具有更好的推理性能, Jess具有通用性。定性约束由于自身的模糊性和不确定性, 现有的本体推理方法还不能很好地对其表示并实现知识推理。在研究过程中发现SWRL支持用户自定义规则的内置, 而且Pellet支持推理, 笔者下一步将探索使用自定义SWRL规则结构表示定性约束, 进而实现复杂产品设计中模糊知识的挖掘。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|